






斜臂機械手特點
*爪旋機構 : 具有爪旋機構,夾具可以旋轉90度,放置成品。
*換模調整機構 : 換模時僅需要將固定扳手松開,全集可旋轉90度,提升換模效率。
*治具回路 : 全功能型預留一組吸回路,可以同時吸成品及夾水口。可應用于一模多腔成品的吸取出。單功能型僅能夾水口,并沒有吸著功能。
*全機械鋁合金精密鑄造,美觀使用,強度好及耐磨。
*控制系統簡單,容易操作。
8組固定程式,20組教導程式,完全符合任何需要。
可外接輸出點,控制輸送帶、承接臺或是噴離型劑裝置。
自動偵測故障情況,顯示于幕面,并自動記錄故障碼。
*上下手臂由鋁合金結構梁及直線線性滑軌組成,結構、具有耐磨性好、不變形、震動小、使用壽命長等特點。
*雙截式倍速機械手臂(特定型號)使用皮帶倍速機構,使得手臂速度快、震動小、耐磨性強
機械手現今的生活上,科技日新月益的進展之下,機械人手臂與有人類的手臂大區別就在于靈活度與耐力度。也就是機械手的大優勢可以重復的做同一動作在機械正常情況下也不會覺得累!機械手臂的應用也將會越來越廣泛,機械手是近幾十年發展起來的一種高科技自動生產設備,作業的準確性和環境中完成作業的能力。工業機械手機器人的一個重要分支。
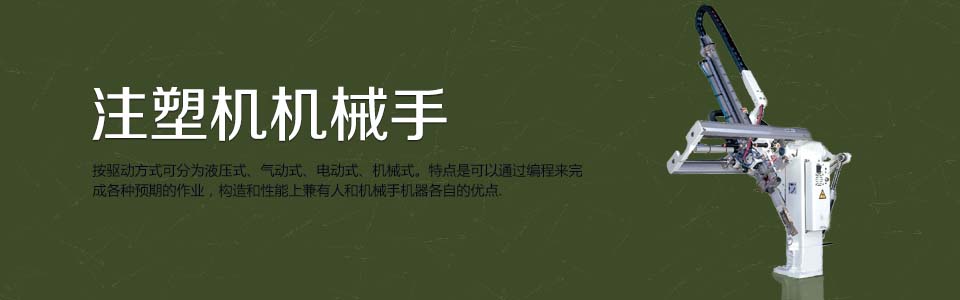
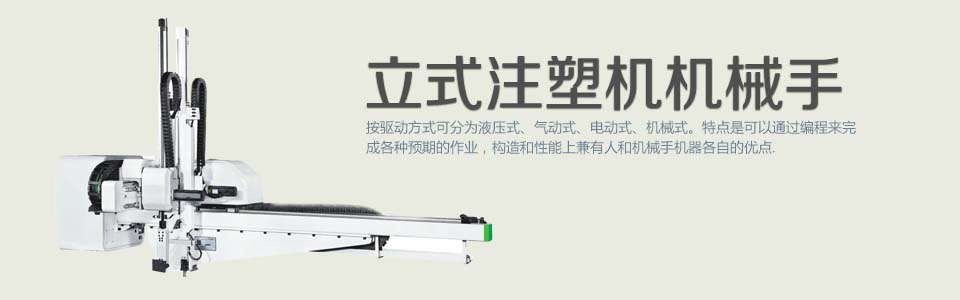
斜臂機械手種類,按驅動方式可分為液壓式、氣動式、電動式、機械式。特點是可以通過編程來完
成各種預期的作業,構造和性能上兼有人和機械手機器各自的優點.
斜臂機械手主要由手部、運動機構和控制系統三大部分組成。手部是用來抓持工件(或工具)的部件,根據被抓持物件的形狀、尺寸、重量、材料和作業要求而有多種結構形式,如夾持型、托持型和吸附型等。運動機構,使手部完成各種轉動(擺動)、移動或復合運動來實現規定的動作,改變被抓持物件的位置和姿勢。運動機構的升降、伸縮、旋轉等獨立運動方式,稱為機械手的自由度 。為了抓取空間中任意位置和方位的物體,需有6個自由度。自由度是機 械手設計的關 鍵參數。自由 度越多,機械手的靈活性越大,通用性越廣,其結構也越復雜。一般專用機械手有2~3個自由度。控制系統是通過對機械手每個自由度的電機的控制,來完成特定動作。同時接收傳感器反饋的信息,形成穩定的閉環控制。控制系統的核心通常是由單片機或dsp等微控制芯片構成,通過對其編程實現所要功能。





 免責聲明:(1)以上所展示的信息由企業自行提供,內容的真實性、準確性和合法性由發布企業負責,環球塑化網對此不承擔任何保證責任。我們原則上建議您優先選擇“塑企通”會員合作! (2)同時我們鄭重提醒各位買/賣家,交易前請詳細核實對方身份,切勿隨意打款或發貨,謹防上當受騙。如發現虛假信息,請向環球塑化網舉報。
免責聲明:(1)以上所展示的信息由企業自行提供,內容的真實性、準確性和合法性由發布企業負責,環球塑化網對此不承擔任何保證責任。我們原則上建議您優先選擇“塑企通”會員合作! (2)同時我們鄭重提醒各位買/賣家,交易前請詳細核實對方身份,切勿隨意打款或發貨,謹防上當受騙。如發現虛假信息,請向環球塑化網舉報。
 簡繁切換
簡繁切換